Ross Manning
Exploring Art and Technology: A Conversation with Ross Manning

Ross Manning is an artist who lives and works in Brisbane. Manning's artistic practice involves creating kinetic sculptures using ordinary materials such as domestic fans, fluorescent lights, household twine, and electronics. His installations often reveal both the construction process and the materials used, fostering playful interactions between light, sound, and movement. His innovative approach to art-making, utilizing everyday objects to produce mesmerizing effects, invites viewers to reconsider the potential of commonplace items in creating transcendent experiences.
We had the opportunity to speak with Manning and reflect on his residency experience at our workshop in Brisbane. This artist repurposed a 'forming' arm into a painter's assistant, leveraging its innate movement logic to create intriguing patterns. The collaboration between the artist and the robotic arm resulted in surprising outcomes, embracing the unpredictability of the artistic process.

Graeme Auchterlonie (GA) Your practice incorporates a vast array of mediums and outcomes, including sound, video, kinetic installation, light and painting, now you have begun to play with robotics within your practice - was there a variation in your expectations and the outcome of the residency?
Ross Manning (RM) I really enjoyed the time at UAP although too short!. There was a lovely good will about the place and people I met. I didn’t have a preconceived outcome or any real expectations, just a few starting points after talking with the technicians and seeing the arm in motion. I went into the residency with an open-ended experimental approach. It was finding out the possibilities of what could be achieved and running tests, thinking on these tests and seeing what could be interesting to try next. The basic premise was to pit the precise, mechanical gesture of the arm against the wet, fluid nature of paint.
(GA) You are often tinkering with existing devices and appliances, taking their kinetic, optical and sonic components and severing them from their original purpose. What lead you to manipulate the 'forming' arm to become a painters assistant, how did you come to making in this way?
(RM) At a time where machines (AI) are independently making creative works, I wanted to use the robotic arm’s innate and internal logic of movement as the mark making process … The arm has set pathways for movement for different jobs, like removing material with a drill head. There are intrinsic patterns that the arm moves. These were the starting patterns we tested. The paint department kindly let me access all the small sample colours in automotive paint (something I would never use by myself). From these starting pattern there is a lot more I’d like to try. We ended up having 2 days of painting with the arm on this residency, so I feel we are still right at the beginning of what could be realised.
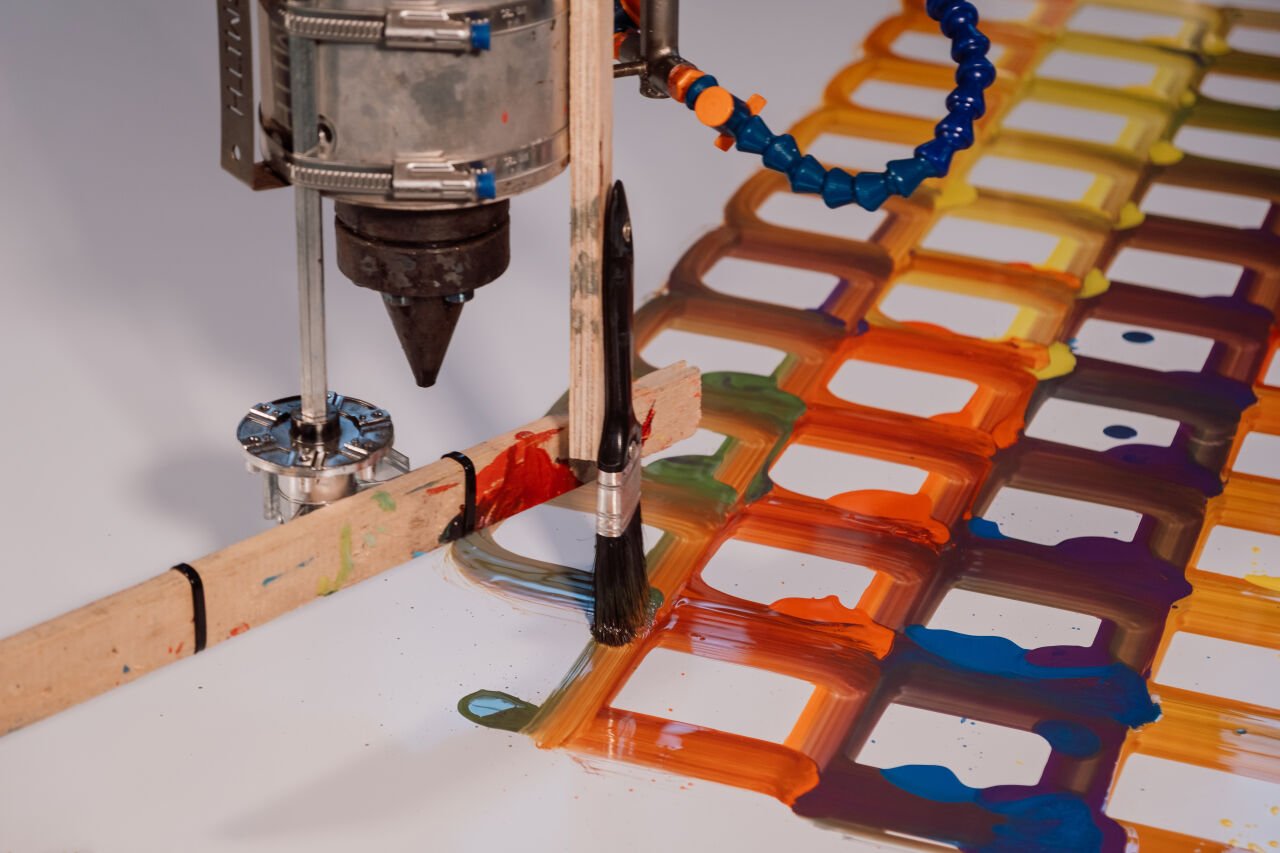

(GA) I love how you placed the paint down and the robotic arm made the geometric gestures to move the paint about the Dibond it was painted on. Could you talk a little about the balance between your intention and how you put the robotic arm to work?
(RM) I used large pipettes to squirt the paint on as the robot was ‘painting’. This was a quick way to place colours down and formed a type of collaboration, but where I became more of the assistant. The colours are from what was on offer with the sample pots and it was more to see what the paint did, its viscosity and application to the Dibond’s smooth aluminium surface. The colour palette’s was secondary for these first test and in future, once the painting gestures and patten have been decided, colour will be very important to choose carefully. It will be a whole other exercise. This stage of the process was to experiment with all the different types of gestures and brush strokes that could be possible.
(GA) Did the patterns you intended to make occur as planned?
(RM) No, they were all a bit of a surprise, that was one thing I did expect though! The arm’s normal application is to reproduce an outcome exactly, a file or drawing that the arm reproduces exactly and repeatedly.. In this case, I was interested in an unknown outcome, and one that can’t be reproduced repeatedly with exactly the same results. I like the humanness in that.


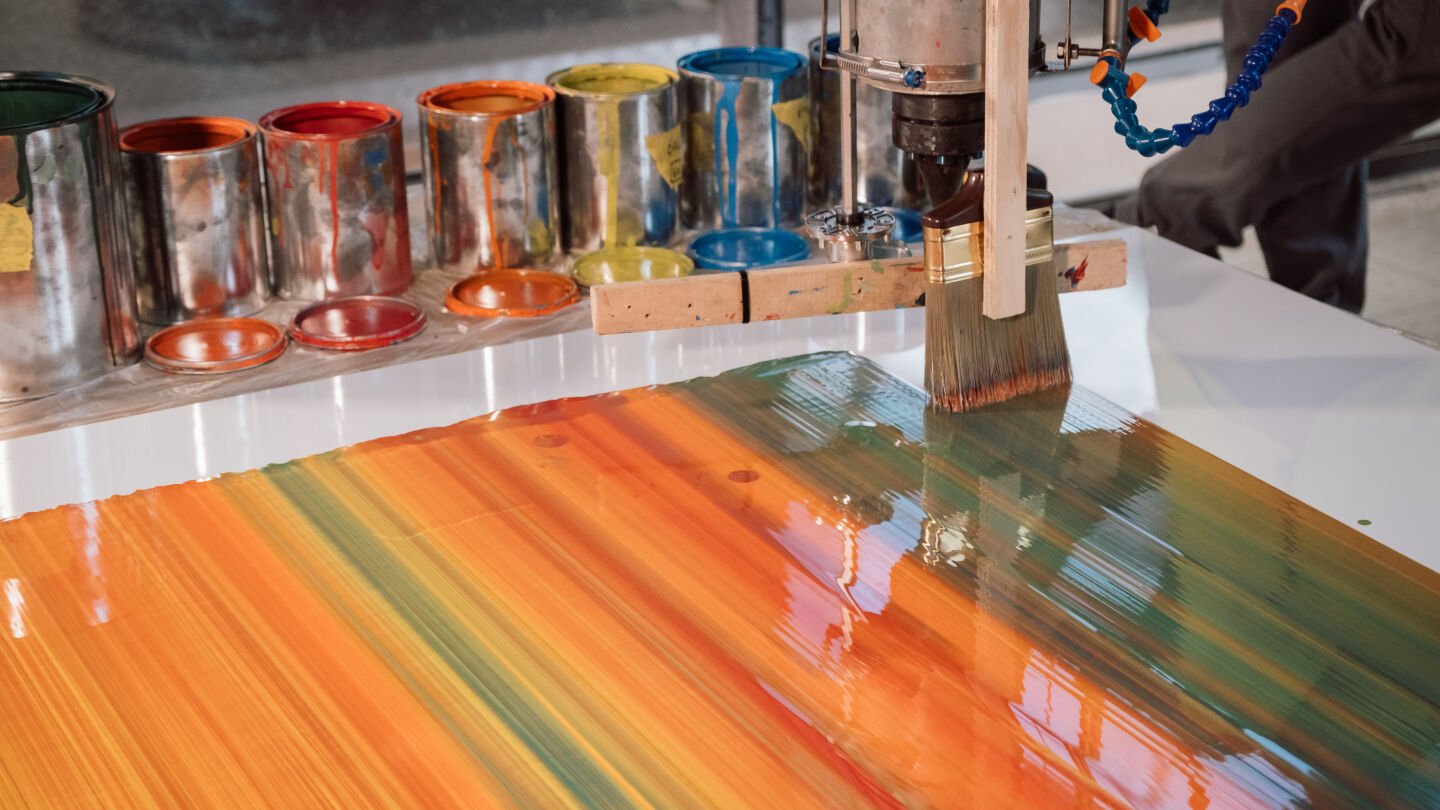




Image Credit: Rachel See | Courtesy of UAP
#Related Articles
Remembering Dick Polich
On Sunday, November 13, 2022, Richard F. (Dick) Polich passed away peacefully in hospice. He was 90. Polich made an enormous contribution to art over the past 50 years through his art foundries: Tallix, Polich Art Works and Polich Tallix.

Exploring Sculpture and Artistic Growth with Matthew Couper
Exploring Sculpture and Artistic Growth with Matthew Couper
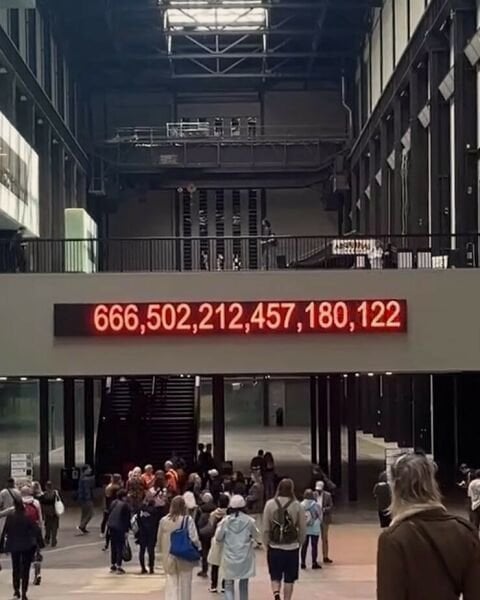
Richard Bell's Pay the Rent at Tate's Turbine Hall
First Nation artist Richard Bell on his protest pieces heading to Tate Modern’s Turbine Hall